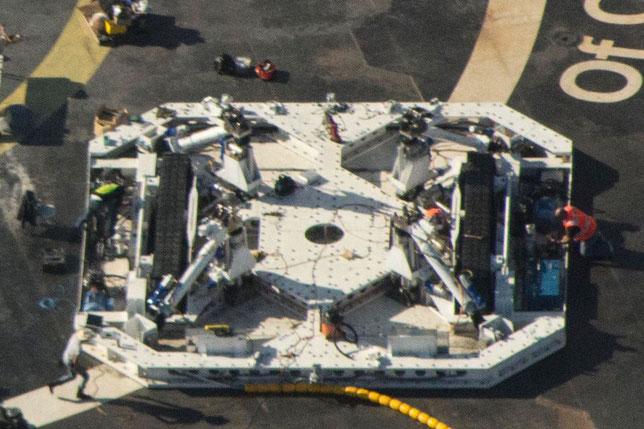
На форуме reddit Space X появилась интересная запись с фотографией, нового оборудования платформы "Of Course I Still Love You" (Я все еще люблю тебя), предназначенной для приема возвращаемой первой ступени ракеты Falcon FT.

Интернет пользователи, следящие за программой Space X, разошлись во мнениях о назначении новой части платформы - Что же это за интересный робот?
Там же, отметился и сам маэстро:
"If fate is on our side, it will be amazing. Will talk about that in detail next week"
"Если судьба на нашей стороне, то это будет удивительно. Поговорим об этом в деталях, на следующей неделе"
Ну а нам, любителям техники остается только, пованговать - Что же это за интересная машина и каково ее назначение?
Одной из первых версий, которую выдвинули пользователи, скорее всего изрядно далекие от мира науки и техники, стала версия автоматического захватчика подлетающей ракеты без использования стандартных опор ракеты. Видать изрядно потрепанные нервы покачивающейся на палубе первой ступени, после всех успешных и не очень посадок, дали о себе знать. То есть, во время подлета ступени, робот будет подкатываться под ступень и захватывать ее своими небольшими манипуляторами. Кто-то даже высказал мнение, что мол теперь Falcon не нужны более опоры. Прям как в автоматическом дартсе.
Скорее всего, это далеко не так.
Что мы видим на фотографии?
Передвижную платформу белого цвета на которой имеется несколько гидравлических манипуляторов. Почему передвижную? Отчетливо заметно пару открытых гусениц с электроприводами, а так же толстый кабель питания желтого цвета.
Согласно масштаба и размеров этого "робота" можно сделать вывод о том, что он как раз помещается, между выдвинутыми опорами первой ступени. То есть, скорее всего, робот будет подъезжать под уже севшую ступень, когда опоры уже выдвинуты. Наличие всего двух больших гусениц и кабеля питания не дает возможность стремительно передвигаться по платформе, выбирая место под соплами быстро спускающейся ступени. Такой механизм, скорее всего не успеет быстро подъехать под ступень во время ее посадки. А ракета, по-прежнему, будет усаживаться на 4 больших опоры. Более того робот, в таком случае, может скорее помешать устойчивой посадке ступени, чем сделать ее безопаснее.
От опор точно не откажутся, так как площадь робота, диаметр первой ступени и ее высота, указывают на недостаточную устойчивость такой конструкции удержания. Хотя я вполне допускаю использование электромагнита в основании этого робота, думаю убирать опоры все же не будут.
Наличие манипуляторов же, указывает на назначение устройства - захват ракеты. Скорее всего, робот будет подъезжать под ступень в первые секунды после посадки, что бы захватить и обеспечить дополнительную устойчивость, уже успешно севшей ступени. Для чего это нужно?
Время старта. В условиях планирования стартов космических ракет, немало важным моментом является погода. И тем более, когда тебе нужно сажать первую ступень на платформу плавающую в океане. Космос штука серьезная. Тут нельзя перенести старт на несколько часов переждав шторм или высокие волны. Данный робот будет обеспечивать возможность посадки на платформу в условиях легкого шторма.
Но, поживем увидим.